Explore Projects
Discover my portfolio of mechanical engineering and robotics projects, showcasing innovation and technical expertise.
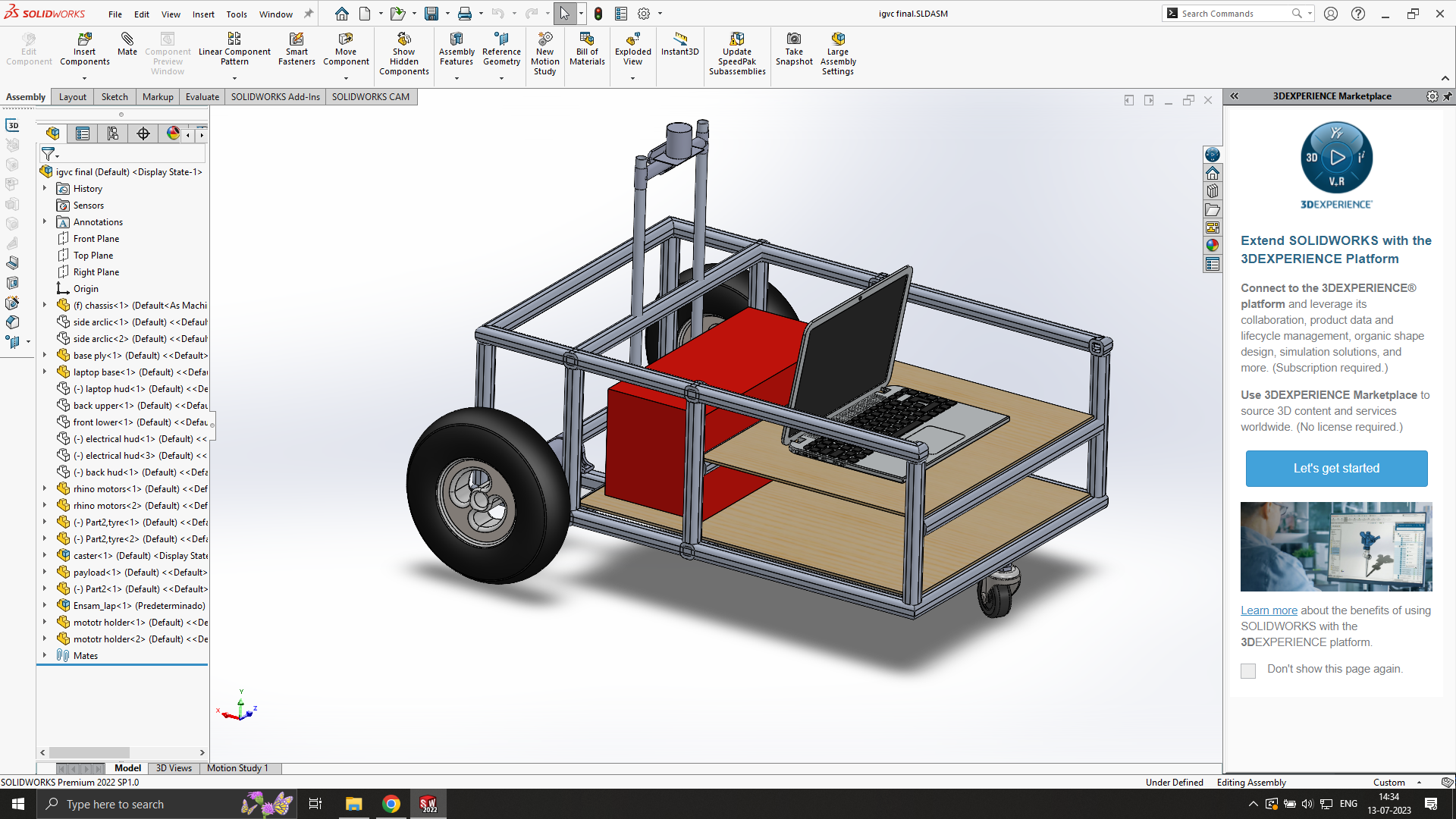
Intelligent Ground Vehicle
Led the design and fabrication of the chassis, including material selection, budget estimation, and ensuring it met competition standards. Focused on optimizing strength, weight, and cost efficiency.
Technologies Used:
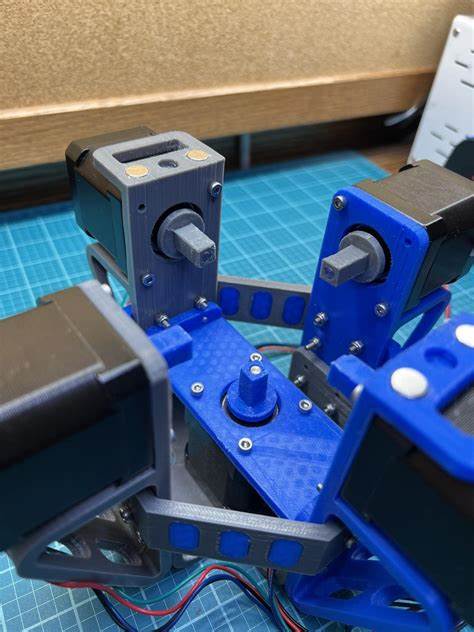
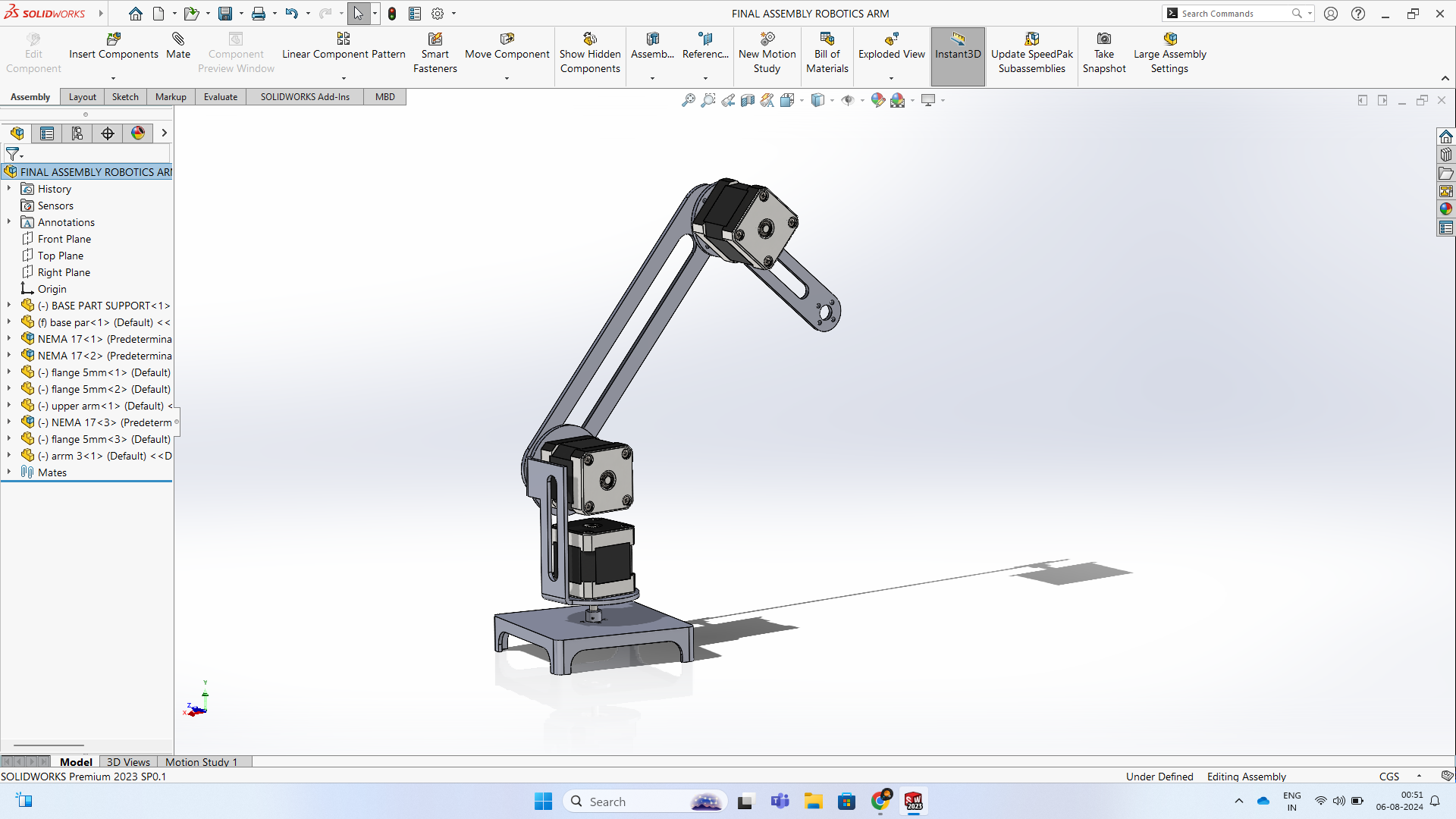
6 DOF Mechanical Arm
Engineered a 3 DOF mechanical arm, focusing on optimizing the mechanical design for automation tasks.
Technologies Used:
6-Wheeled ROVER
Led the design and research of a 6-wheeled rover optimized for rocky terrains, ensuring durability and performance under challenging conditions.
Technologies Used:

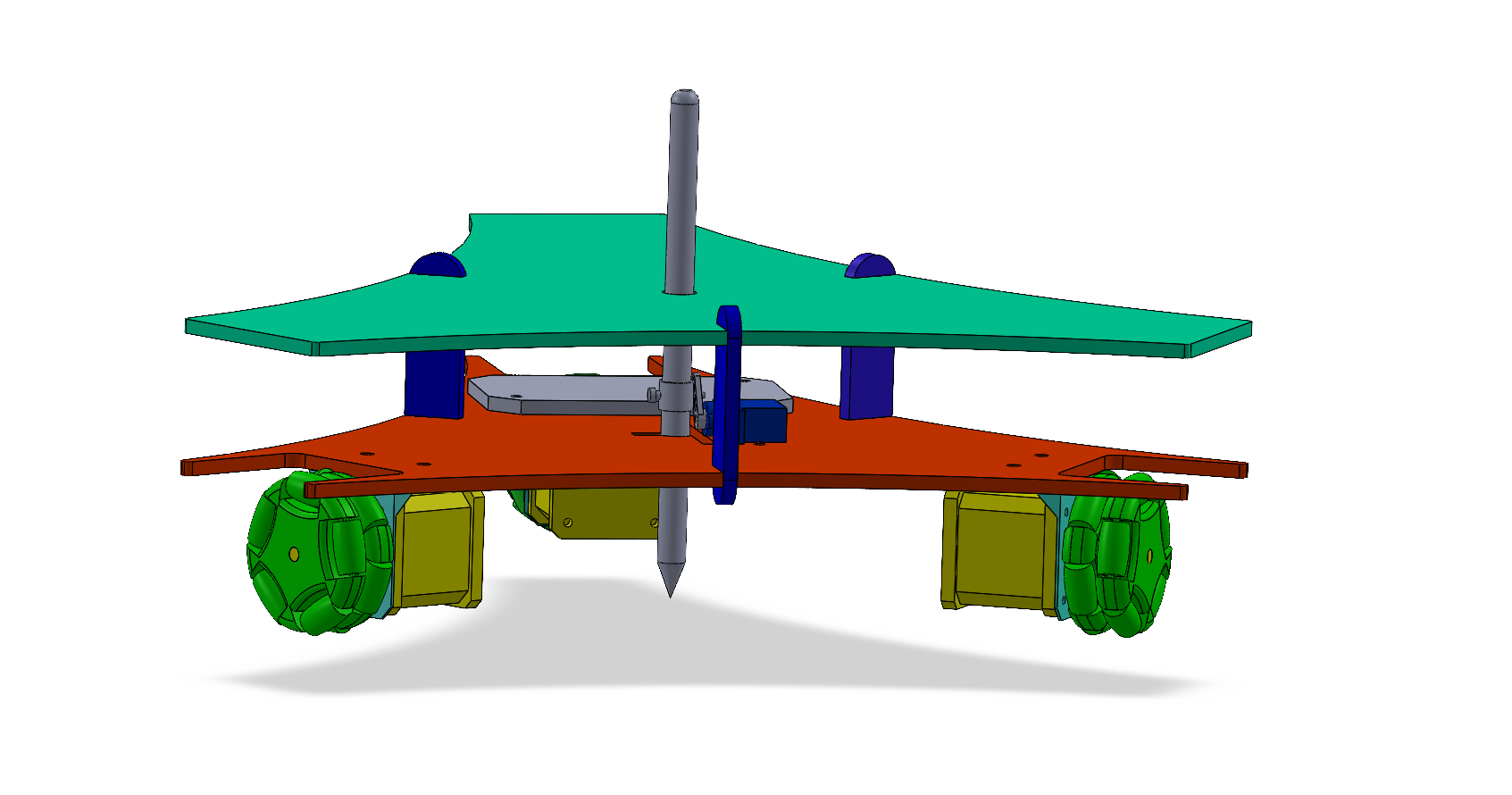
Holonomic Art Bot
Engineered and optimized the chassis design for a 3-wheeled holonomic drive bot for precise floor drawing tasks.
Technologies Used:
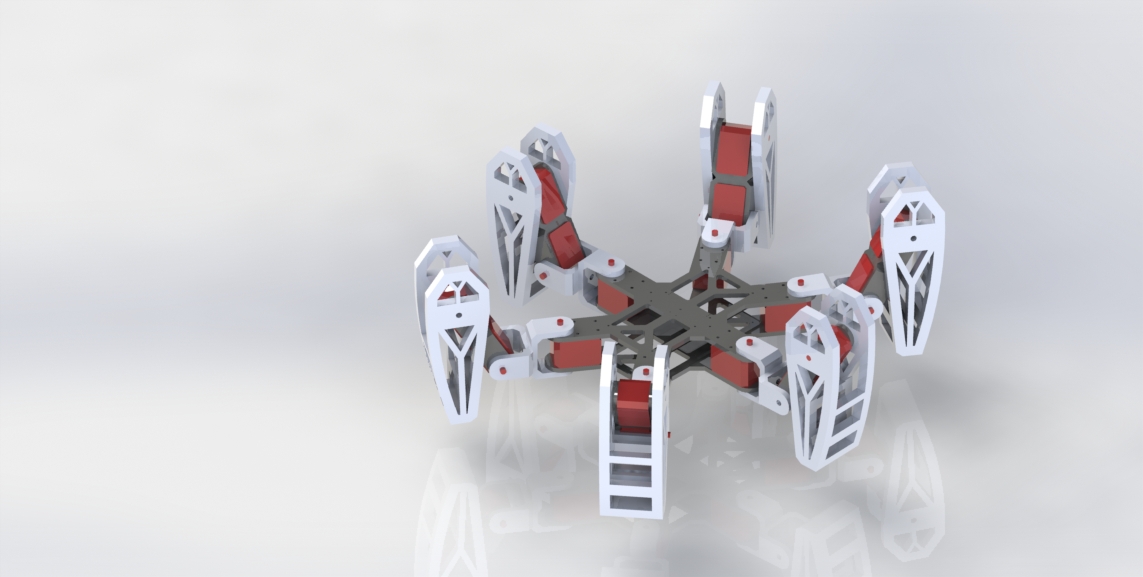
HEXAPOD
Designed a hexapod robot optimized for stable and efficient locomotion across diverse terrains.
Technologies Used:
Rubics Cube Solver
Engineered a Rubik's Cube solver with precise mechanical design for rapid and accurate cube manipulation.
Technologies Used: